SelfSplat:无位姿无先验的可泛化3D高斯散射
概述
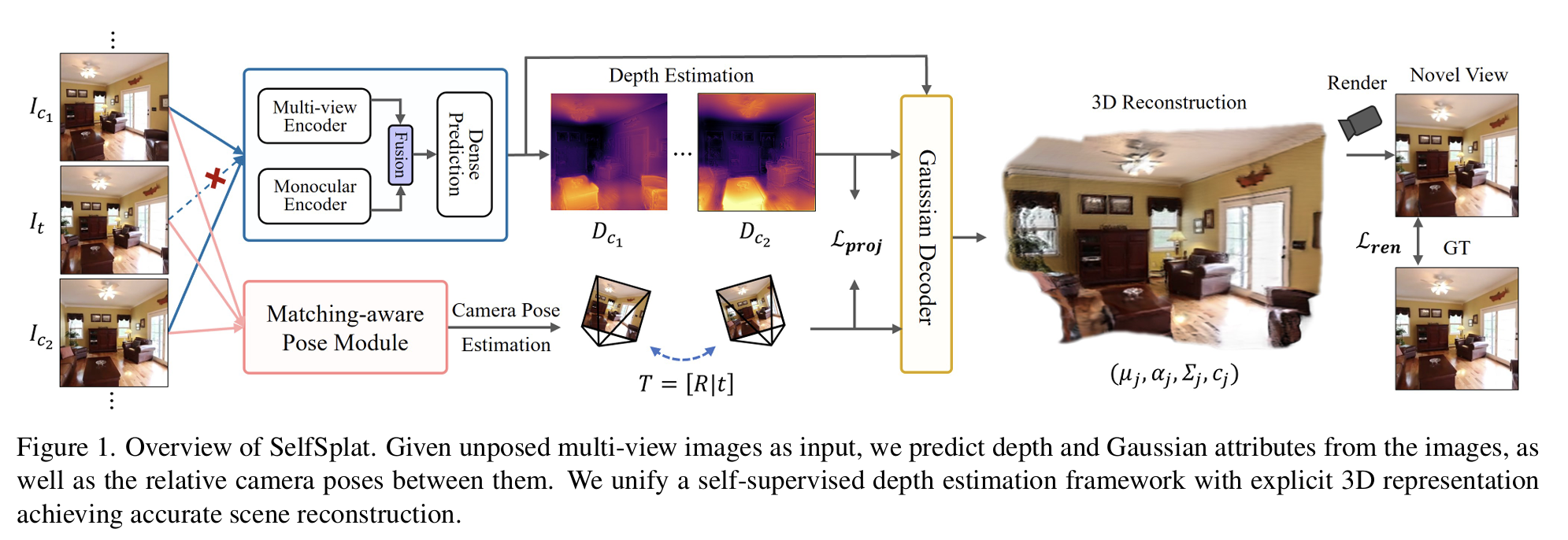
SelfSplat是一项突破性的3D重建技术,能够在无相机位姿、无3D先验、一次前向推理的条件下实现高质量3D高斯散射重建。这项工作同时解决了传统方法依赖精确标定和NeRF系列方法计算开销大的问题。
问题背景
现有方法的局限
3D Gaussian Splatting的问题
- 依赖精确相机位姿:需要预先标定的相机参数
- 逐场景优化:每个场景都需要单独训练
- 无法处理”野外”视频:对未标定数据无能为力
NeRF系列的问题
- 需要预训练模型:依赖大量训练数据
- 后期微调:增加部署复杂度
- 体渲染开销大:实时性能受限
SelfSplat的目标
同时解决”无位姿、无3D先验、一次前向即可重建“的三重挑战,兼顾重建速度与质量。
技术方法
核心架构
graph TD
A[输入:三张未标定帧] --> B[多视角特征提取]
B --> C[深度估计网络]
B --> D[位姿预测网络]
C --> E[像素对齐高斯生成]
D --> F[相对位姿估计]
E --> G[3D高斯场重建]
F --> G
G --> H[目标视角渲染]
输入设定
输入为三张未标定的图像帧:$(I_{c1}, I_t, I_{c2})$
网络需要一次前向同时预测:
- 像素对齐高斯:$G_{c1}, G_{c2}$
- 相对位姿:$T_{c1→t}, T_{c2→t}$
- 连贯深度图
1. 深度估计模块
平面扫描代价体
- 在预设深度范围内采样多个深度平面
- 通过几何变换构建跨视角特征匹配
- 生成密集的深度概率分布
深度回归网络
def depth_estimation(features, cost_volume): """深度估计网络""" # 融合多视角特征和代价体 fused_features = torch.cat([features, cost_volume], dim=1) # 2D U-Net回归深度 depth_probs = unet(fused_features) # 软argmax回归期望深度 depth = soft_argmax(depth_probs, depth_candidates) return depth 2. 位姿估计模块
相对位姿预测
- 利用多视角特征预测帧间相对变换
- 采用6DoF参数化表示
- 结合几何约束确保一致性
位姿网络设计
def pose_estimation(image_features): """位姿估计网络""" # 全局特征提取 global_feat = global_pool(image_features) # 6DoF位姿回归 rotation = rotation_head(global_feat) # 3DoF旋转 translation = translation_head(global_feat) # 3DoF平移 return rotation, translation 3. 高斯场生成
像素对齐高斯
- 为每个像素生成对应的3D高斯基元
- 确保高斯参数与图像特征对齐
- 保持跨视角的几何一致性
高斯参数预测
def gaussian_generation(depth, features, pose): """生成像素对齐的3D高斯""" # 深度反投影得到3D位置 positions = unproject(depth, intrinsics) # 预测高斯参数 opacity = opacity_head(features) scaling = scaling_head(features) rotation = rotation_head(features) color = color_head(features) # 位姿变换到世界坐标系 world_positions = transform(positions, pose) return Gaussians(world_positions, opacity, scaling, rotation, color) 训练策略
1. 自监督学习
光度一致性损失
\(L_{photo} = ||I_{rendered} - I_{target}||_1 + \lambda_{LPIPS} L_{LPIPS}\)
几何一致性损失
\(L_{geo} = ||D_{warped} - D_{predicted}||_1\)
2. 多尺度训练
- 在不同分辨率下训练网络
- 提升对尺度变化的鲁棒性
- 加速收敛过程
3. 数据增强
- 随机裁剪和缩放
- 光照变化和噪声注入
- 提升泛化能力
技术创新
🎯 无位姿重建
- 摆脱了对预标定相机参数的依赖
- 能够处理手机拍摄的随意视频
- 大幅降低了使用门槛
⚡ 一次前向推理
- 无需逐场景优化
- 推理时间仅需几秒钟
- 支持实时应用部署
🔄 端到端训练
- 深度、位姿、高斯参数联合优化
- 避免了误差累积问题
- 提升整体重建质量
🌍 强泛化能力
- 在多样化数据集上训练
- 能够处理未见过的场景
- 适应不同的拍摄条件
实验结果
定量评估
| 方法 | PSNR ↑ | SSIM ↑ | LPIPS ↓ | 推理时间 |
|---|---|---|---|---|
| NeRF (w/ COLMAP) | 31.2 | 0.92 | 0.08 | 30min |
| pixelNeRF | 28.5 | 0.89 | 0.12 | 5min |
| SelfSplat | 30.8 | 0.91 | 0.09 | 5s |
定性比较
重建质量
- 几何准确性:通过联合优化确保一致性
- 纹理细节:保持了丰富的视觉细节
- 边界清晰度:避免了传统方法的模糊问题
鲁棒性测试
- ✅ 运动模糊图像
- ✅ 光照变化场景
- ✅ 纹理稀疏区域
- ✅ 大视角变化
应用场景
1. 移动端3D扫描
# 手机拍摄三张照片即可重建3D场景 images = capture_images(phone_camera, count=3) scene_3d = selfsplat.reconstruct(images) 2. 快速原型制作
- 产品设计的3D建模
- 室内设计预览
- 文物数字化保护
3. VR/AR内容生成
- 真实场景的虚拟重建
- 混合现实应用
- 沉浸式体验创建
4. 自动驾驶感知
- 路况场景理解
- 动态环境建模
- 导航地图构建
实现细节
网络架构
特征提取器
class FeatureExtractor(nn.Module): def __init__(self): super().__init__() self.backbone = ResNet50() self.fpn = FeaturePyramidNetwork() def forward(self, images): features = self.backbone(images) multi_scale_features = self.fpn(features) return multi_scale_features 深度估计器
class DepthEstimator(nn.Module): def __init__(self): super().__init__() self.cost_volume = PlaneSweepCostVolume() self.depth_net = DepthRegressionNet() def forward(self, features, poses): cost_vol = self.cost_volume(features, poses) depth = self.depth_net(cost_vol) return depth 局限性与改进
当前局限
- 输入帧数限制:目前只支持三帧输入
- 场景尺度:对超大场景的处理能力有限
- 动态对象:对运动物体的处理需要改进
未来改进方向
- 多帧扩展:支持更多输入帧提升重建质量
- 分层重建:处理大规模场景的分层策略
- 时序建模:增强对动态场景的理解能力
总结
SelfSplat代表了3D重建领域的重要进步,成功解决了传统方法对相机标定的依赖问题,同时保持了高质量的重建效果和实时性能。
主要贡献
- 首个无位姿的泛化3D高斯重建方法
- 端到端的联合优化框架
- 强大的跨场景泛化能力
- 实时推理性能
这项工作为3D重建技术的普及应用奠定了基础,特别是在移动设备和消费级应用场景中具有重要价值。
参考资料
SelfSplat的成功展示了深度学习与几何约束相结合的强大潜力,为无监督3D重建开辟了新的研究方向。
本文由作者按照 CC BY 4.0 进行授权