BIGS: Bimanual Category-agnostic Interaction Reconstruction from Monocular Videos via 3D Gaussian Splatting
核心
仅给一段单目视频,在双手与未知物体复杂交互、严重遮挡的情况下,同时重建两只手与物体的3D形状/姿态与交互关系,并能进行新视角/新姿态渲染。这是比“一只手 + 物体”更困难的设定。
其实就是相比于HOLD把SDF换成了Gaussian并做了双手的联合优化,本身创新点不多
问题/背景:
- 目前已有的方法过于依赖一些先验,一些方法被限制在10-20种特定的的物品,难以涵盖真实世界大量物品的场景
- HOLD方法基于SDF-一种NERF方法。MANUS方法需要多个视角
方法
核心思路
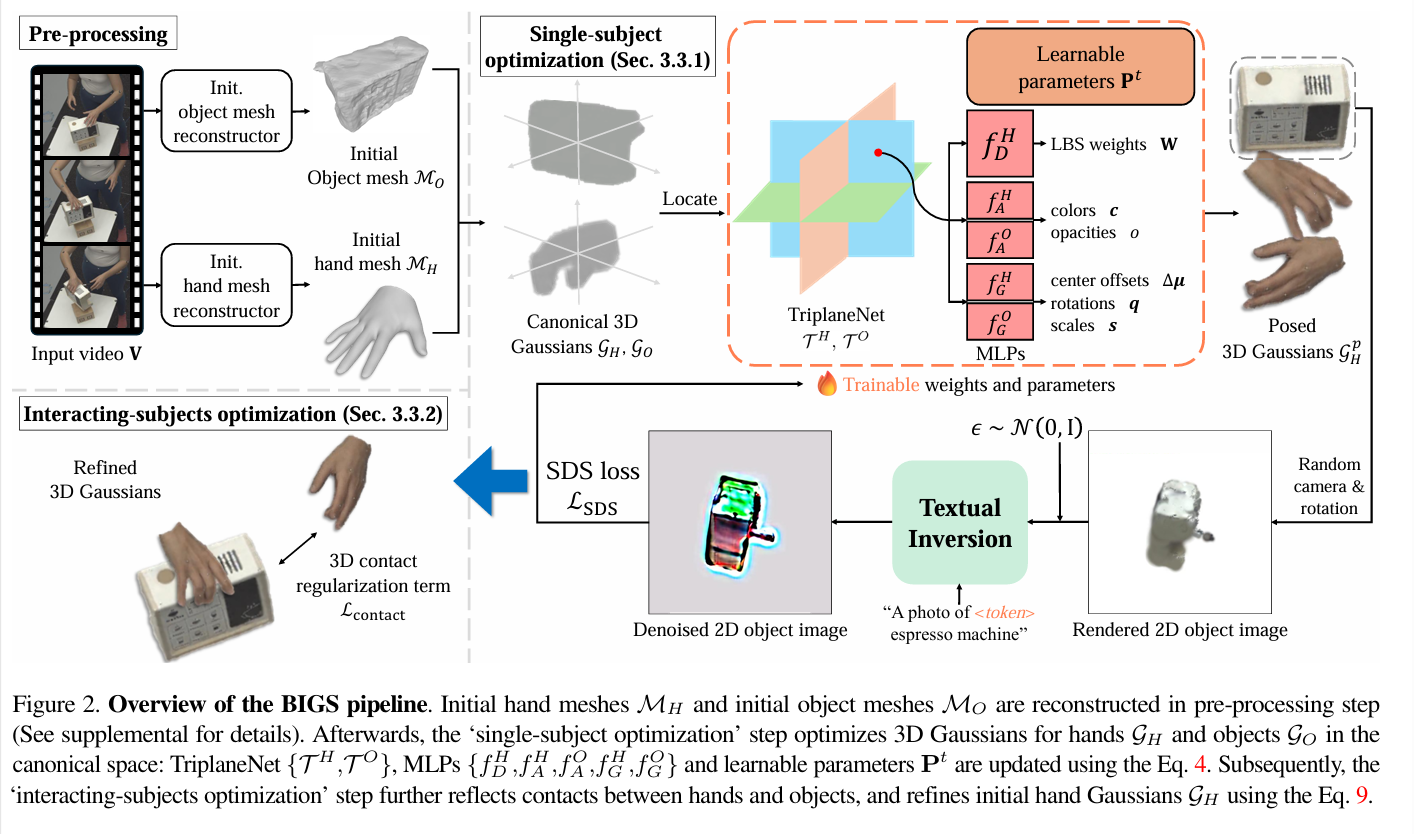
使用3D Gaussian Splatting (3DGS)作为统一显式表示;手与物体先分别优化得到可靠几何,再进行交互一致性优化校正手—物体的3D对齐;其中特别用扩散模型的SDS损失修补物体在遮挡处的“看不见”表面,而手部则依赖MANO先验 + 单一手高斯共享来稳健恢复。
1) 预处理
- 相机与初始几何:用层次定位/SfM得到相机与物体点云与位姿;手部用 HaMeR(Transformer-based regressor)回归 MANO 的姿态 θ、形状 β、全局旋转 Φ/平移 Γ。这些网格顶点用作高斯初始位置。
2) 手的高斯(canonical → posed)
- 在canonical空间只建一套”右手”高斯 $G_H$,通过TriplaneNet 特征+ 三个 MLP(几何 $f_G^H$、外观 $f_A^H$、LBS权重 $f_D^H$)预测每个高斯的中心偏移、旋转、尺度、颜色、不透明度与到各关节的LBS权重。
- 利用 MANO 的骨架变换和 LBS 将 canonical 高斯变换到姿态空间(Eq. (3)),再用视频帧的($Φ_H^t, Γ_H^t$)送到图像坐标。
- 关键:单手共享。左手通过x 轴翻转共享同一套右手 canonical 高斯,从而在有限视角下”汇聚”双手信息、缓解遮挡。
LBS 是什么?(Linear Blend Skinning,线性混合蒙皮)
- 本质:把一个点(这里是手的高斯中心)当作会被多根骨骼/关节同时影响的“蒙皮点”,用一组权重对各关节的刚体变换做线性加权,得到该点在姿态空间的位置。
公式(BIGS 用到的形式):对第 iii 个手部高斯在规范空间的中心 μic\mu_i^{c}μic,其姿态空间中心
$\mu_i^{p}=\sum_{k=1}^{K} W_k(\mu_i^{c})\bigl(\Phi_k\,\mu_i^{c}+\Gamma_k\bigr),$
其中 KKK 是手的关节数;,$\Phi_k,\Gamma_k$ 是第 k 个关节的旋转与平移;$W_k(\cdot)$ 是该点受第 k 个关节影响的权重(各权重通常非负且和为1)
https://zhuanlan.zhihu.com/p/693202505
3) 物体的高斯(canonical)
- 物体也在 canonical 空间建高斯 $G_O$,用TriplaneNet + 两个 MLP(几何 $f_G^O$、外观 f_A^O)预测参数;再用帧级($Φ_O^t, Γ_O^t$)送到图像坐标。
4) 两阶段优化
阶段A:单主体优化(手/物体分开)
- 总目标(Eq. (4)):L_image + I_hand L_hand + I_obj L_obj。
- 图像一致性损失 L_image:对手/物体前景(SAM2 得到mask)进行 L1 + SSIM + VGG 感知损失,并含颜色/尺度正则与mask-outside惩罚(避免漂移高斯),见 Eq. (5)。
- 手部损失 L_hand:
- 时间平滑:θ^t、Γ_H^t的相邻帧差分;
- LBS权重正则:把预测的 LBS 权重拉向由 MANO 网格近邻顶点插值得到的伪真值(F-范数),见 Eq. (6)。
- 物体损失 L_obj(SDS):
- 先做文本反演,学到”**A photo of
- 用 PiDi-ControlNet(边界条件)给扩散模型加几何边界约束;
- 随机虚拟相机绕 canonical 物体渲染前景图,再用SDS梯度推动物体高斯补全不可见面(Eq. (7))。
- 先做文本反演,学到”**A photo of
阶段B:交互主体优化(对齐接触)
- 观察:遮挡与少视角会导致手/物体在3D里错位,影响接触。
- 做法:仅优化每帧双手平移 $Γ_L^t, Γ_R^t$,加入接触正则 L_contact——鼓励手与物体在空间上靠近(权重较小,λ=1.0),总目标 Eq. (9)。
5) 渲染与动画
- 一旦得到手/物体高斯,即可在新手姿 / 新物体姿 / 新机位下渲染视频与图像(图1、图3有示例)
实验
数据集
- ARCTIC
- HO3Dv3
指标
- MPJPE
- Chamfer distance (CDo)
- F10
- hand-relative Chamfer distance (CDl and CDr)
- PSNR, SSIM, LPIPS
贡献/成果
- 提出BIGS:面向“双手 + 未知物体 + 单目视频”的3DGS重建管线;
- 两阶段优化:先“单主体”(手/物体各自)再“交互主体”(对齐接触);
- 物体端引入SDS(文本反演 + PiDi-ControlNet 约束)以弥补不可见面;手端共享一套右手的canonical高斯并镜像到左手;
- 在 ARCTIC(双手)与 HO3Dv3(一手)上取得SOTA的手/物体重建、接触重建与渲染质量。
本文由作者按照 CC BY 4.0 进行授权